How to reduce muscle tone, pain, and damage using Netti Dynamic System
We at Netti are convinced that our Netti Dynamic System can improve quality of life for the wheelchair user as the system will reduce muscle tone, pain and damage to both chair and user. To fully understand the value and the principle of the patented Netti Dynamic System, we will look at the biomechanics first. Afterwards we will explain how the Netti Dynamic System was built around the open kinetic chain theory.
The mechanism of muscle contraction explained
 Muscles are innately elastic, due to the presence of titin also known as connectin, a giant protein, that functions as a molecular spring which is responsible for the passive elasticity of the muscle. Skeletal muscles are attached to bones via tendons that maintain the muscle under a constant level of stretch called the resting length. When the attachment is removed, for example if the tendon of the Achilles tendon is cut from the heelbone, the muscle would shorten in length and end up at the top of the calf.
Muscles are innately elastic, due to the presence of titin also known as connectin, a giant protein, that functions as a molecular spring which is responsible for the passive elasticity of the muscle. Skeletal muscles are attached to bones via tendons that maintain the muscle under a constant level of stretch called the resting length. When the attachment is removed, for example if the tendon of the Achilles tendon is cut from the heelbone, the muscle would shorten in length and end up at the top of the calf.
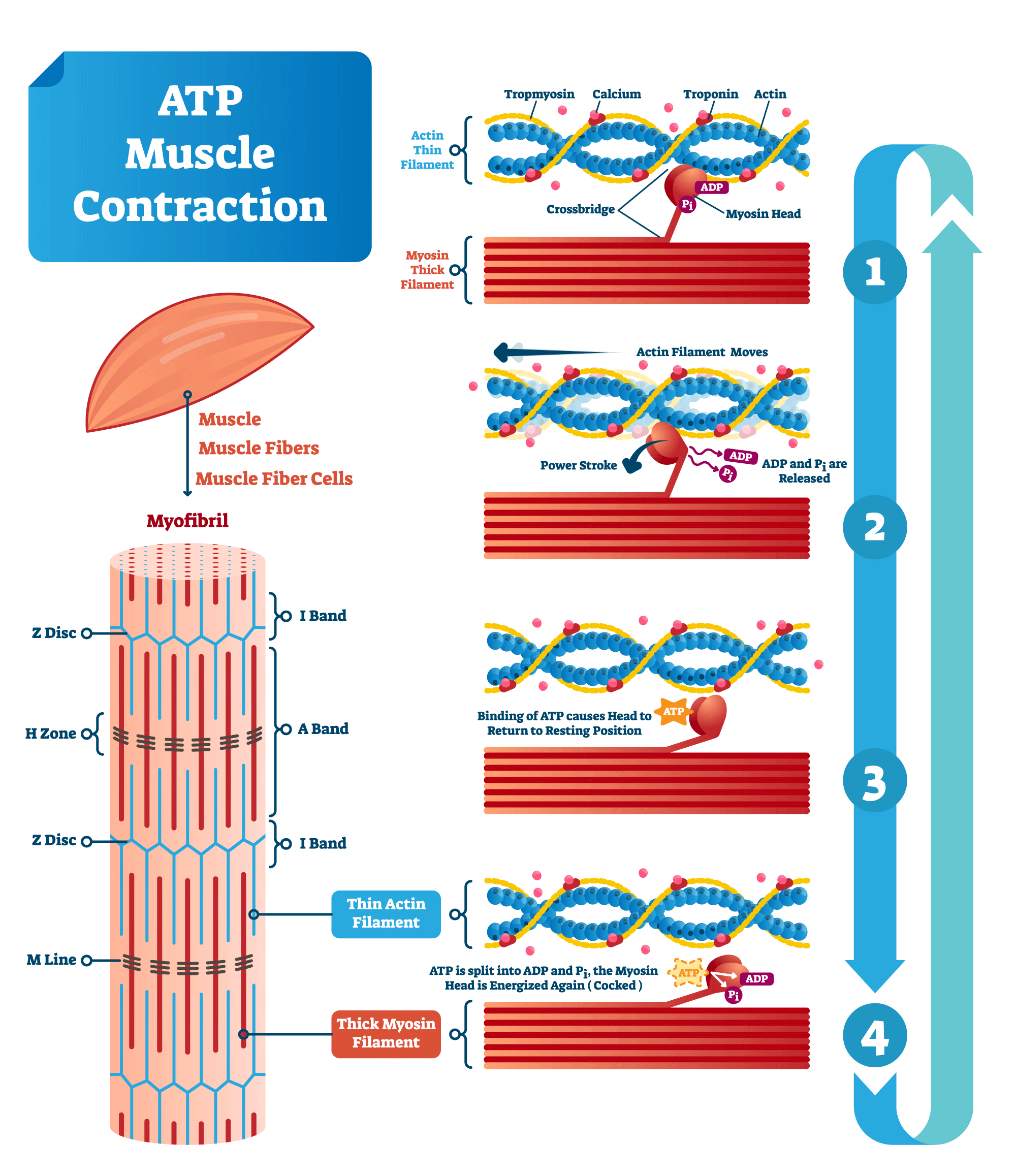
Muscles exist in this state to optimize the force produced during contraction, which is modulated by the interlaced myofilbril of the sarcomere.
When a sarcomere contracts, myosin heads will attach to actin to form cross-bridges (see stage 1)
Then, the thin actin filaments slide over the thick myosin filaments as the heads pull the actin (see stage 2)
This results in sarcomere shortening, creating the tension of the muscle contraction.
If a sarcomere is stretched too far, there will be insufficient overlap of the myofilaments and the less force will be produced. If the muscle is over-contracted, the potential for further contraction is reduced, which in turn reduces the amount of force produced.
Simply put, the tension generated in a skeletal muscle is a function of the magnitude of overlap between actin and myosin myofilaments.
In mammals, there is a strong overlap between the optimum and actual resting length of sarcomeres which means great muscle strength. There is a weak overlap when the muscle is shortened or elongated, which results in poor muscle strength.
Let’s look at the force-length relationship of the muscles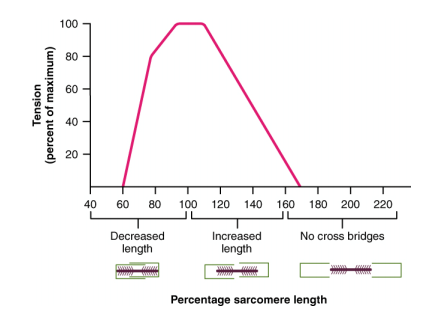
If we look at the force-length relationship, it indicates that muscles generate the greatest force when at their resting (ideal) length, and the least amount of force when shortened or stretched relative to the resting length. Sarcomeres produce maximal tension when thick and thin filaments overlap between about 80 percent to 120 percent, approximately 1.6 to 2.6 micrometres, and is the ideal length of a sarcomere.
Introduction to the Dynamic Seating system
 The independent performed literature review on Dynamic Seating from 2019 (1) concluded with:
The independent performed literature review on Dynamic Seating from 2019 (1) concluded with:
The dynamic wheelchair is a promising solution, especially for wheelchair users suffering from neuromuscular conditions. By supporting movements, it influences several important aspects of its user. This consequently benefits the health of the user. Overall, the dynamic wheelchair lowers discomfort and pain levels, enhances sitting tolerance and quality of life of the dynamic wheelchair user.
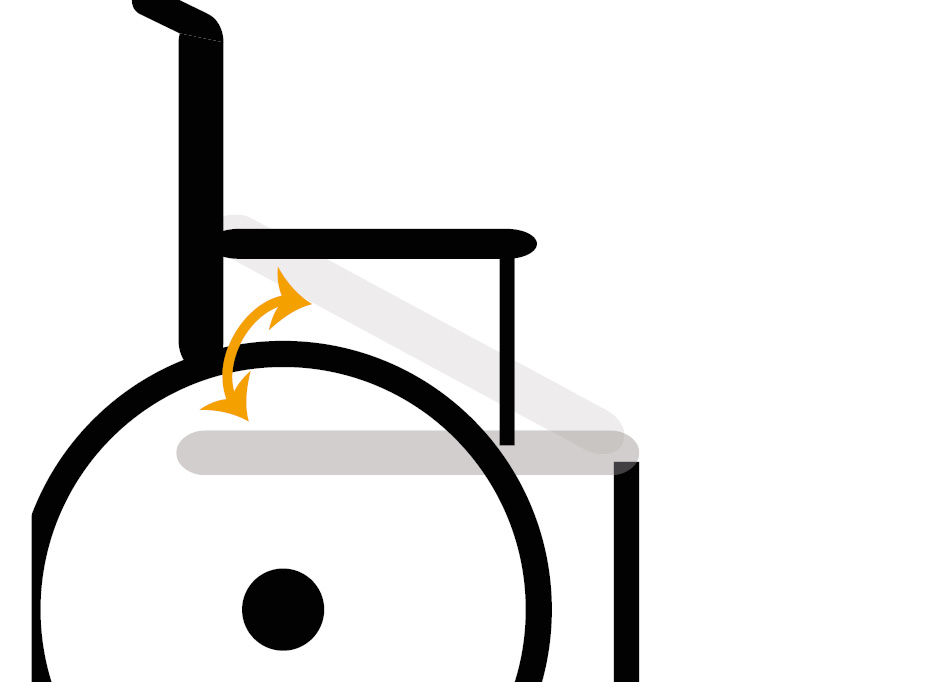
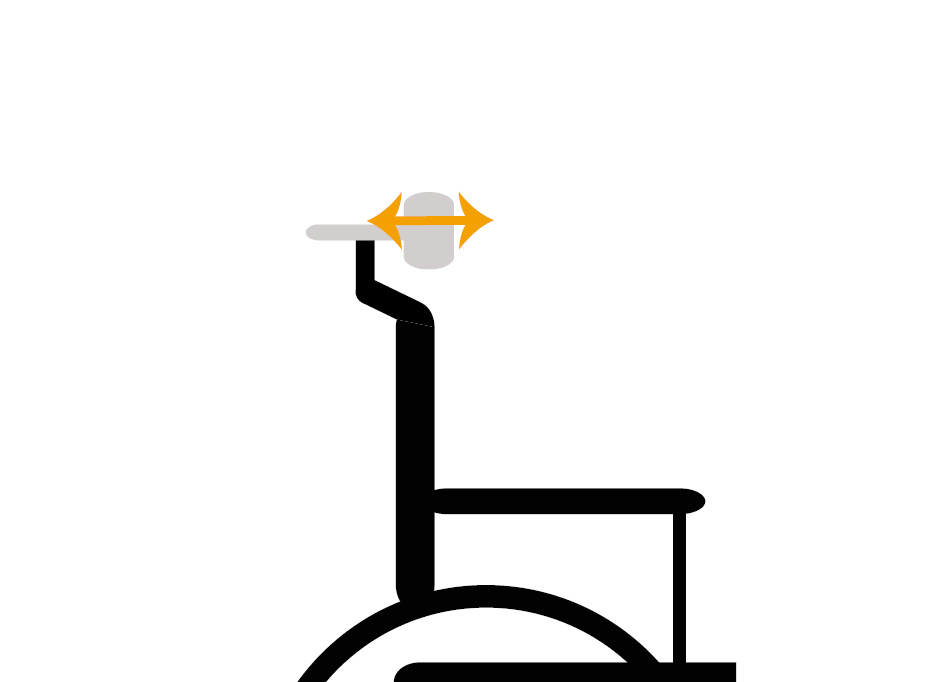
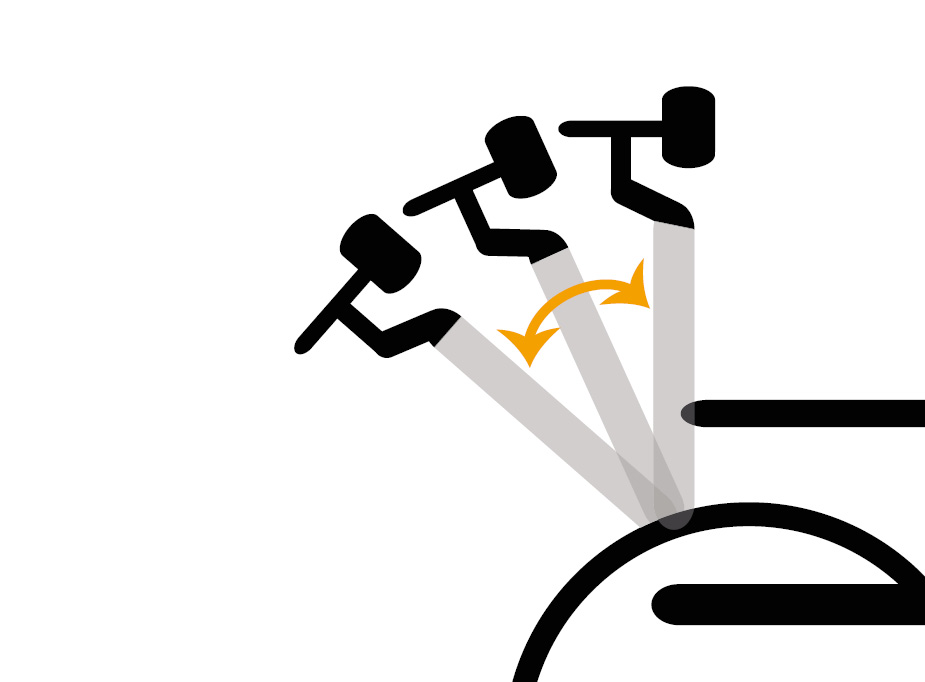
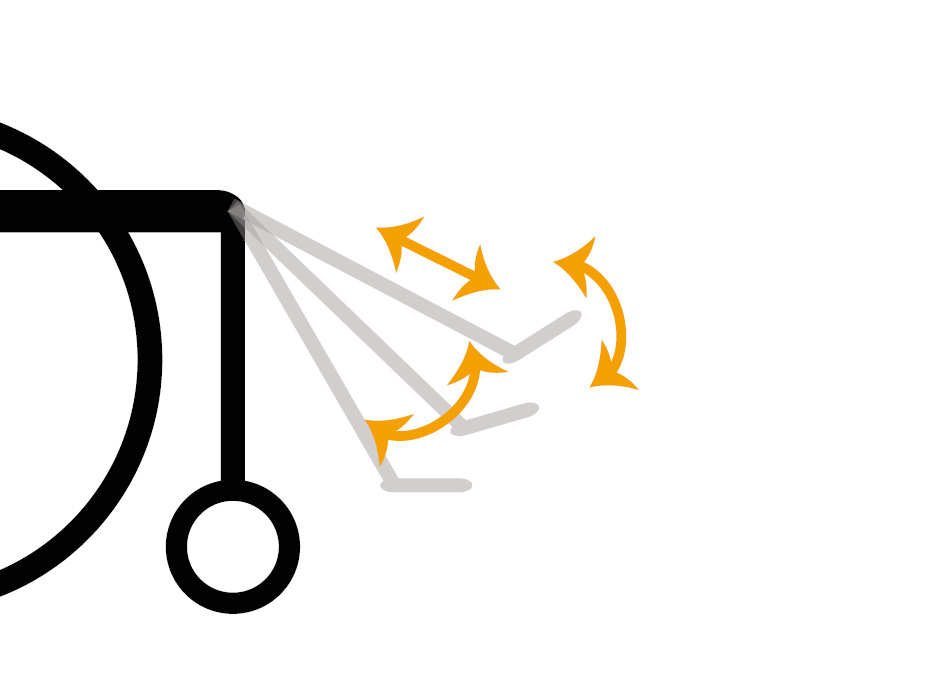
In this article, we focus on the muscle tone, pain and damage to the patient and chair. The advantages of the Netti Dynamic seating system are all due to allowing movement and letting the muscles react in a different “end-position” of the muscles. The different end-position means that we let the bones of the joints involved, move, so the muscles involved come into their shortest position when there is no resistance due to the closed kinetic chain. The Netti Dynamic system is the only dynamic system which has been built around the open kinetic chain theory and therefore the force of the spams is reduced and the movement is smoother.
If we look at human, we could say that the body itself has a lot of potential energy. Potential energy is the energy an object possesses because of its position of rest, stresses within itself, its electric charge, or other factors.
Some of this energy is used outside our own control, like the energy, which is used to breath, makes our heart beat, digest food etc. We have only a little influence on these actions, e.g. we can stop breathing for a short time. The rest of the energy which is stored in our body can be used as we decide ourselves, for instance, we can take a walk, lift weights, wheel a wheelchair, lift our leg.
In some cases, we lose the control over the regulation systems for this energy and the energy is set free at places in our bodies and into activities which we do not wish, like e.g. CP patients who have involuntary movements due to muscle spasms.
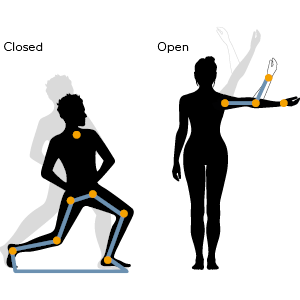
What is the difference between an open kinetic chain versus a closed kinetic chain?
An open kinetic chain is a combination of successively arranged joints in which the terminal segment can move freely.
- In an open kinetic chain movement, the distal aspect of the extremity, or the end of the chain farthest from the body, moves freely and is not fixed to an object (8)
A closed kinetic chain is an environment in which the distal segment meets considerable external resistance and restrains movement
- In a closed kinetic chain movement, the distal end of the extremity is fixed, emphasizing joint compression (8)
What happens when an involuntary movement occurs
– in a rigid wheelchair
Due to the disease, neurologic faults occur which results in the possibility of wrong use of the potential energy in our body. When the muscle tone starts to increase (start of the spasm), this potential energy is converted into kinetic energy (the energy an object possesses because of its state of motion), and therefore the body tries to move a certain part into a certain direction.
In the case where this body part is fixed to e.g. a static wheelchair with straps, there will be a little dynamic movement at the beginning, when the muscle tone increases, and the rest of the energy will be lost via an isometric muscle contraction and a static movement in a kinetic closed chain. The muscle tone is high while the muscle is often at it strongest position, with thick and thin filaments overlap between about 80 percent to 120 percent. Remember from the explanation above, this is the strongest position of the muscle and it can produce maximum force.
This results in a high strain on the body and wheelchair. Fixed in a static wheelchair, users can exert up to 200% of their body weight against the backrest and 600% of their body weight against the footrests during extension. Dynamic seating can be used to diffuse these forces (3).

What happens when an involuntary movement occurs
- in a dynamic wheelchair
When the body part which is set to movement is not fixed (like in the Netti Dynamic System), it can move over a certain distance and loses some of its energy by doing so in an isotonic muscle contraction. This results in a dynamic movement of the part being moved and this movement happens in an open kinetic chain. At the end of the movement the contraction remains often for a longer period, due to the spasm remaining, while the muscle is often in the maximal shortened position and the joints are not able to move any more.
Conclusion:
A dynamic system which allows the joints to make a full movement and let the muscle end in the maximal shortened position via an open kinetic chain, will result in the least amount of force in the end position. This means less forced applied to the wheelchair but also less force on the muscle, the joints, and the body.
Netti Dynamic System gives the user multiple advantages:
- Less forces are applied by the user on the Netti Dynamic System compared to a regular wheelchair which makes it longer lasting
- Less forces are applied on the muscles, joints and body of user of the Netti Dynamic System compared to a regular wheelchair user
- A lesser need for repositioning
- Possibility to use movement to express yourself since the movements are not limited
- Possibility to vary sitting position
- Possibility to learn new movements
- Reduce shear forces at important areas
- Reduce pressure at important areas
- Increase alertness
- Decrease agitation
- Reduction of “bumbs” caused by sudden spasms
Ref list:
- The dynamic wheelchair: Enabling movement for wheelchair users by L.A. Bock and S.A. Hebels
- Ellenbecker, T.S., and Davies, G.J. (2001). Closed Kinetic Chain Exercise: A Comprehensive Guide to Multiple Joint Exercises, (1st ed.). Champaign, Ill.: Human Kinetics.
- Samaneein, K., Greene, P., Lees, K., and Riches, P. (2013). Comparison of Imparted Forces between Rigid and Dynamic Seating Systems during Activities of Daily Living by Children with Cerebral Palsy.